Mon cher voisin Dominique cultive une passion depuis très longtemps, celle pour le modélisme ferroviaire. Il réalise des maquettes uniques, électrifiées où il fait circuler des trains à l’échelle 1/87. Ce sont des vrais bijoux de tout point de vue.
Dans ce modèle ferroviaire il y a des aiguillages qui permettent aux trains d’emprunter une voie plutôt qu’une autre. Un panneau de contrôle permet d’effectuer ces choix à l’aide de boutons poussoirs. Des afficheurs, des diodes LED permettent d’avoir un retour de la situation dans les gares, des aiguillages, etc.
Les aiguillages sont normalement constitués d’une partie mobile qui permet de choisir une voie ou une autre.
L’auguillage qui m’a prêté pour des tests est celui sur la photo de couverture.
Ces mouvements sont possibles grâce à des électroaimants. Pour chaque aiguillage il y en a deux.
Le fonctionnement peut se résumer à celui d’un relai électromécanique en configuration bistable à deux bobines.
Dans les constructions existantes, la commande des aiguillages se fait par deux boutons. Si l’on veut faire bouger l’aiguillage il faut appuyer sur un bouton. Dès que l’on veut que le rail effectue un mouvement dans l’autre sens il faut appuyer sur l’autre bouton.
Dominique souhaite obtenir le même comportement en utilisant un seul bouton poussoir. A chaque fois où l’utilisateur appuie dessus, l’aiguillage inverserait sa position. En plus de cela il souhaite avoir un retour lumineux pour connaître depuis le panneau de commande dans quelle position l’aiguillage se trouve.
Ce n’est pas fini. Il souhaite obtenir ce fonctionnement sans utilisation d’un microcontrôleur. Il veut que le tout soit réalisé par l’implémentation d’une carte en utilisant des simples composants élémentaires d’électronique analogique et digitale.
C’est un exercice intéressant et je souhaite l’effectuer avec lui.
Je commence par faire fonctionner l’aiguillage manuellement.
Celui qui m’a fourni pour les tests c’est un R385 Gauche du fabricant Jouef.
La résistivité des deux bobines est autour de 34 Ohm et il est alimenté avec une DC 12V.
En principe avec un courant de 0.35A cela devrait suffire.
Avec l’alimentateur de banc je règle une DC de 12V et 0A. J’augmente progressivement le courant et j’observe que l’aiguillage commence à bouger autour des 0.2A et il a un comportement assez fluide dès 0,3A. C’est bon.
Je teste les deux électroaimants et ils semblent bien fonctionner.
Analyse :
- Dans le fonctionnement en production il faut surtout que lorsqu’une bobine est alimentée, l’autre ne la soit pas.
- Une fois que l’aiguillage a effectué le mouvement demandé il faut arrêter l’alimentation sur les deux bobines
- La commande se fait à l’aide d’un simple bouton-poussoir
- Le retour se fait par deux diode LED, une pour chacune des deux positions possibles
Je propose à Dominique le fonctionnement décrit dans le schéma suivant :
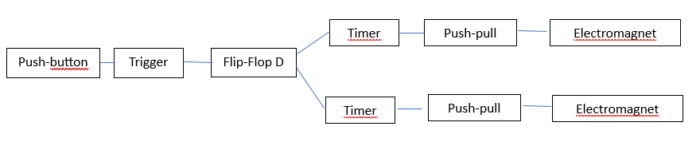
A grandes lignes :
- Le bouton pour commander le système
- Un flip-flop en configuration D pour basculer d’un côté à l’autre
- Les électroaimants qui représentent le système d’aiguillage
A ces trois éléments principaux, j’ajoute :
- Un Trigger de Schmidt pour produire le signal de pilotage de la bascule. Selon les caractéristiques du flip-flop il faudra satisfaire la vitesse de changement dans le CLK.
- Un stade temporisateur pour alimenter la bobine seulement le temps dont elle a besoin pour effectuer le changement d’un rail à l’autre. J’implémente le temporisateur avec un multivibrateur monostable basé sur un 555.
- Un stade push-pull pour que l’on puisse alimenter l’électroaimant à sa tension de travail. J’implémente l’alimentation par une paire de Darlington en configuration PNP.
- Les diodes LED de retour, non représentés dans le schéma pourraient être placées entre la bascule et le temporisateur.
- J’ajoute en parallèle aux bobines une diode de roue libre pour protéger des surtensions lors de l’ouverture.
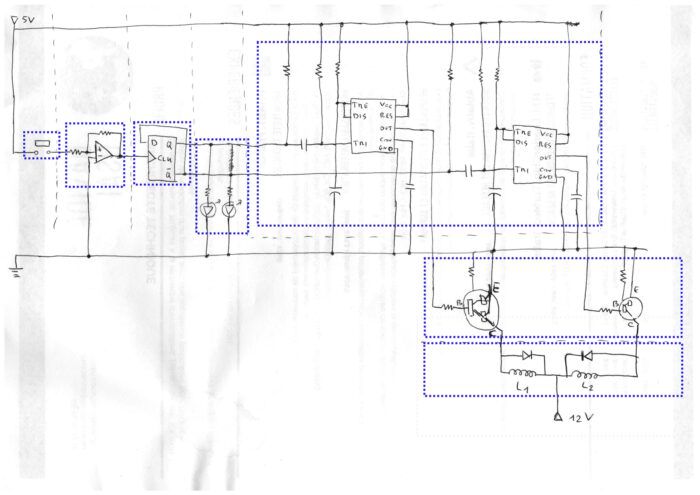
Une implémentation possible pourrait être la suivante :
Dominique l’implémente dans un logiciel de simulation et voici le résultat :
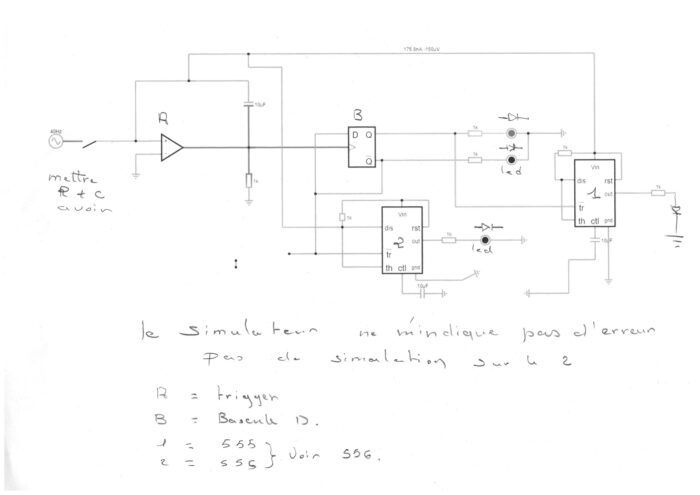
Il n’y a pas tous les éléments car certains stades ont été prévus dans un deuxième temps. Par ailleurs le trigger est implementé différemment mais cela ne veut pas dire qu’il ne fonctionne pas.
Globablement, il a fait un excellent travail qu’il faudra poursuivre.
Prochaines étapes :
- Implémentation du circuit sur un simulateur pour valider son fonctionnement
- Implémentation du circuit sur une platine d’essai et test sur le modèle
- Réalisation d’un dessin du PCB
- Réalisation du PCB en petite série
- Intégration du PCB dans le modèle ferroviaire de Dominique